VIF-Handler And Vif Drivers Design¶
Purpose¶
The purpose of this document is to present an approach for implementing design of interaction between VIF-handler and the drivers it uses in Kuryr-Kubernetes Controller.
VIF-Handler¶
VIF-handler was intended to handle VIFs. Currently it is responsible for reacting on Pod object events, and for creating/deleting corresponding KuryrPort CRD object.
KuryrPort-handler¶
KuryrPort is responsible for taking care about associated Pod VIFs. The main aim of this handler is to get the KuryrPort CRD object, created by the VIF-handler, send it to the:
VIF-driver for the default network,
enabled Multi-VIF drivers for the additional networks,
and get VIF objects from both.
After that KuryrPort-handler is able to activate, release or update VIFs. KuryrPort-handler should stay clean whereas parsing of specific pod information should be done by Multi-VIF drivers.
Multi-VIF driver¶
The new type of drivers which is used to call other VIF-drivers to attach additional interfaces to Pods. The main aim of this kind of drivers is to get additional interfaces from the Pods definition, then invoke real VIF-drivers like neutron-vif, nested-macvlan to retrieve the VIF objects accordingly.
All Multi-VIF drivers should be derived from class MultiVIFDriver. And all should implement the request_additional_vifs method which returns a list of VIF objects. Those VIF objects are created by each of the vif-drivers invoked by the Multi-VIF driver. Each of the multi-vif driver should support a syntax of additional interfaces definition in Pod. If the pod object doesn’t define additional interfaces, the Multi-VIF driver can just return.
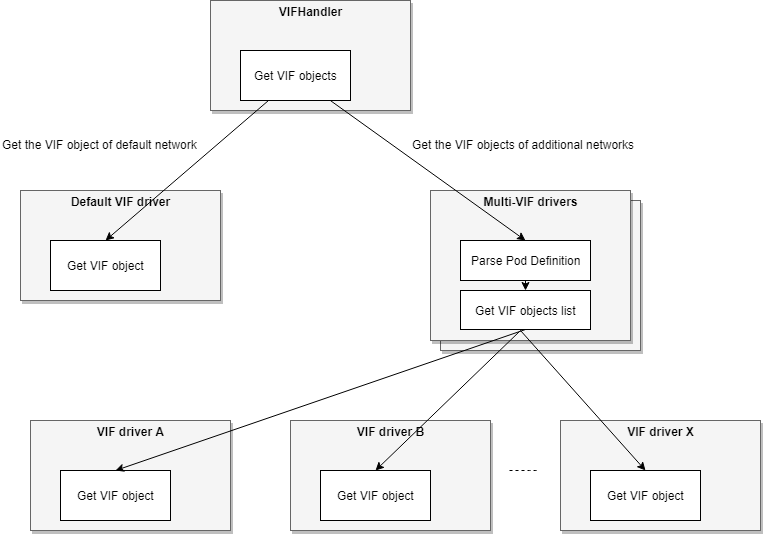
Diagram describing VifHandler - Drivers flow is giver below:
Config Options¶
Add new config option “multi_vif_drivers” (list) to config file that shows what Multi-VIF drivers should be used in to specify the addition VIF objects. It is allowed to have one or more multi_vif_drivers enabled, which means that multi_vif_drivers can either work separately or together. By default, a noop driver which basically does nothing will be used if this field is not explicitly specified.
Option in config file might look like this:
[kubernetes]
multi_vif_drivers = additional_subnets
Or like this:
[kubernetes]
multi_vif_drivers = npwg_multiple_interfaces
Additional Subnets Driver¶
Since it is possible to request additional subnets for the pod through the pod annotations it is necessary to have new driver. According to parsed information (requested subnets) by Multi-vif driver it has to return dictionary containing the mapping ‘subnet_id’ -> ‘network’ for all requested subnets in unified format specified in PodSubnetsDriver class. Here’s how a Pod Spec with additional subnets requests might look like:
spec:
replicas: 1
template:
metadata:
name: some-name
labels:
app: some-name
annotations:
openstack.org/kuryr-additional-subnets: '[
"id_of_neutron_subnet_created_previously"
]'
Specific ports support¶
Specific ports support is enabled by default and will be a part of the drivers to implement it. It is possible to have manually precreated specific ports in neutron and specify them in pod annotations as preferably used. This means that drivers will use specific ports if it is specified in pod annotations, otherwise it will create new ports by default. It is important that specific ports can have vnic_type both direct and normal, so it is necessary to provide processing support for specific ports in both SRIOV and generic driver. Pod annotation with requested specific ports might look like this:
spec:
replicas: 1
template:
metadata:
name: some-name
labels:
app: some-name
annotations:
spec-ports: '[
"id_of_direct_precreated_port".
"id_of_normal_precreated_port"
]'
Pod spec above should be interpreted the following way: Multi-vif driver parses pod annotations and gets ids of specific ports. If vnic_type is “normal” and such ports exist, it calls generic driver to create vif objects for these ports. Else if vnic_type is “direct” and such ports exist, it calls sriov driver to create vif objects for these ports. If certain ports are not requested in annotations then driver doesn’t return additional vifs to Multi-vif driver.
